Veröffentlichungen
Klitzke, L.; Meyer, J.; Leune, T.; Koch, C. and Köster, F. (2019). DAGMaR: A DAG-based Robust Road Membership Estimation Framework for Scenario Mining. In 2019 Sixth International Conference on Internet of Things: Systems, Management and Security (IOTSMS), The Second International Workshop on Intelligent Transportation and Connected Vehicles Technologies (ITCVT 2019), Granada, Spain, pages 358 - 365. DOI: IOTSMS48152.2019.8939213
Klitzke, L.; Koch, C.; Haja, A. and Köster, F. (2019). Real-world Test Drive Vehicle Data Management System for Validation of Automated Driving Systems. In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems - Volume 1: VEHITS, ISBN 978-989-758-374-2, pages 171-180. DOI: 10.5220/0007720501710180
Haja, A.; Koch, C. and Klitzke, L. (2017). The ADAS SWOT Analysis - A Strategy for Reducing Costs and Increasing Quality in ADAS Testing. In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems - Volume 1: VEHITS, ISBN 978-989-758-242-4, pages 320-325. DOI: 10.5220/0006354103200325
Spinneker, Rita et al. (2014). Fast fog detection for camera based Advanced Driver Assistance Systems. In 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), pages 1369-1374. DOI: 10.1109/ITSC.2014.6957878
1. Container
Projektteam

Lars Klitzke, MEng.


Prof. Dr. Andreas Haja
Intelligente Validierung von Fahrerassistenzsystemen
Projektlaufzeit: 03.2016-09.2020
Effizientes Absichern von Fahrfunktionen
In dem Forschungsprojekt FASva der Hochschule Emden/Leer werden Verfahren und Werkzeuge zur Reduzierung von Aufwänden bei der Validierung von Fahrerassistenzsystemen erarbeitet, entwickelt und erprobt. Das Ziel des Projektes ist die Identifizierung und Beschreibung von systemrelevanten Szenarien und davon abgeleitete Systemparameter als wichtige Voraussetzung für das Absichern von automatisiertem und später autonomen Fahren.
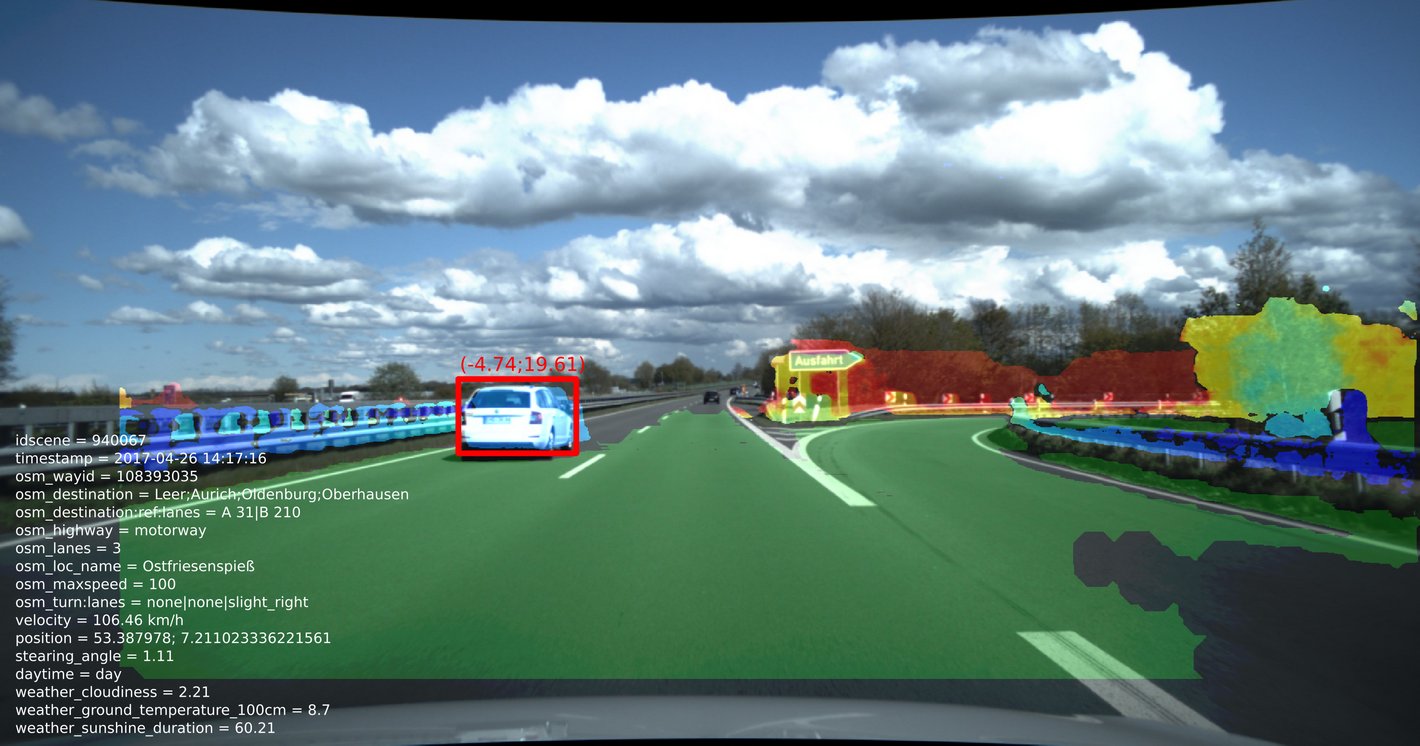
Hierfür soll ein möglichst umfassendes Modell des Fahrzeugumfeldes (siehe Abbildung 1) erarbeitet werden, um mit Hilfe dessen potentielle negative Einflussgrößen auf das System zu identifizieren. Diese Erkentnisse können im gesamtem Entwicklungsprozess von Fahrerassistenzsystemen und automatisierten Fahrzeugen einfließen, mit dem Ziel, diesen Vorgang sowohl signifikant effizienter und somit kostengünstiger als auch sicherer zu gestalten.

Messdatenmanagement für Fahrzeugsensorik
Für die Verwaltung der Messdaten und der Anreicherung zu einem umfangreichem Umgebungsmodell wurde ein modulares Rahmenwerk in C++/Python entwickelt. Durch eine standardisierte Schnittstelle ist das Rahmenwerk unabhängig von der, für die Messfahrten verwendeten, industriellen Lösung zur Aufzeichnung der Fahrten. Aktuell wird zur synchronen Aufzeichnung der Daten von Fahrzeugsensorik und Front-Kamera das Automotive Data and Time-Triggered Framework (ADTF) von Elektrobit verwendet - bislang wurden damit Fahrten im Umfang von ca. 25.000 km durchgeführt.
Eine primäre Komponente des Rahmenwerkes ist das Identifizieren von Szenarien. Dieser Prozess besteht aus mehreren komplexen, beliebig erweiterbaren Teilprozessen, welche bspw. zuständig für das Aggregieren der Daten und das Anreichern aus beliebigen externen Datenquellen (OpenStreetMap, Deutscher Wetterdienst) sind. Für die Analyse und Planung von Testfahrten wurde zudem eine visuelle Darstellung entwickelt (siehe Abbildung 2). Des Weiteren ist es möglich, Statistiken von den Fahrten zu generieren - hier kann aktuell zwischen drei verschiedene Typen von Diagrammen (Tortendiagramm, Balkendiagramm, Hexaplot) ausgewählt werden (siehe bspw. Abbildung 3 und Abbildung 4). Die Statistiken helfen dabei eine hohe Vielfalt der Testfahrten und somit einen hohen Informationsgehalt der Messdaten sicher zu stellen.


